Intrusion Detection Systems (IDS) for Controller Area Networks (CAN) Bus
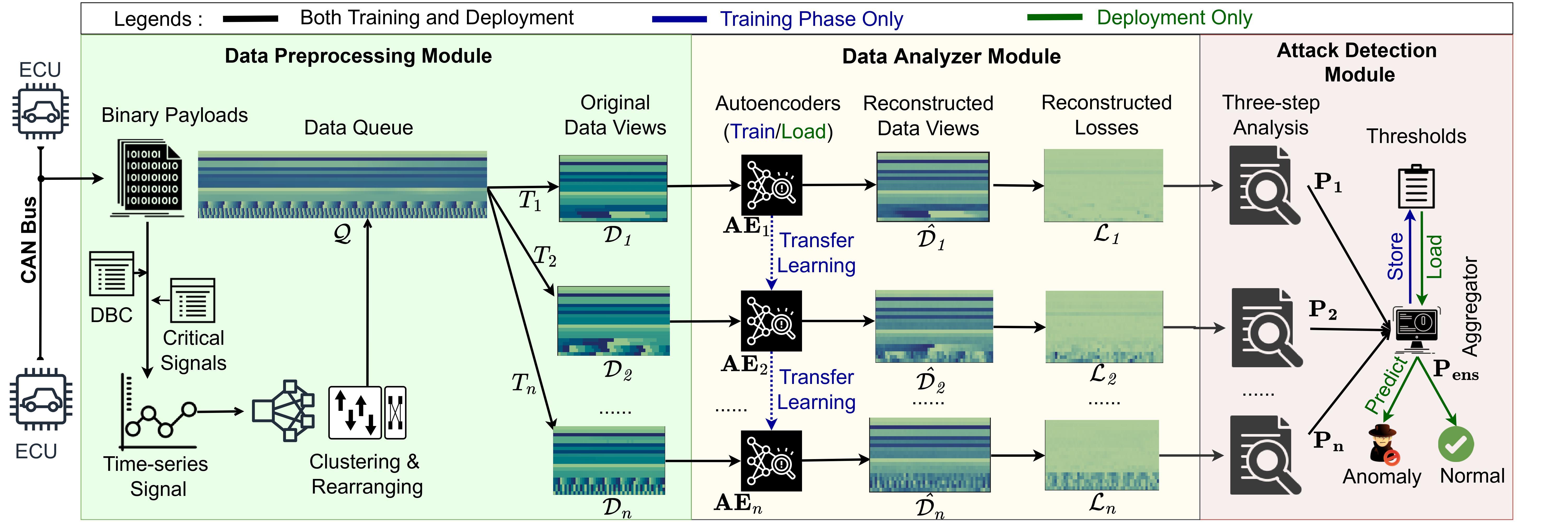
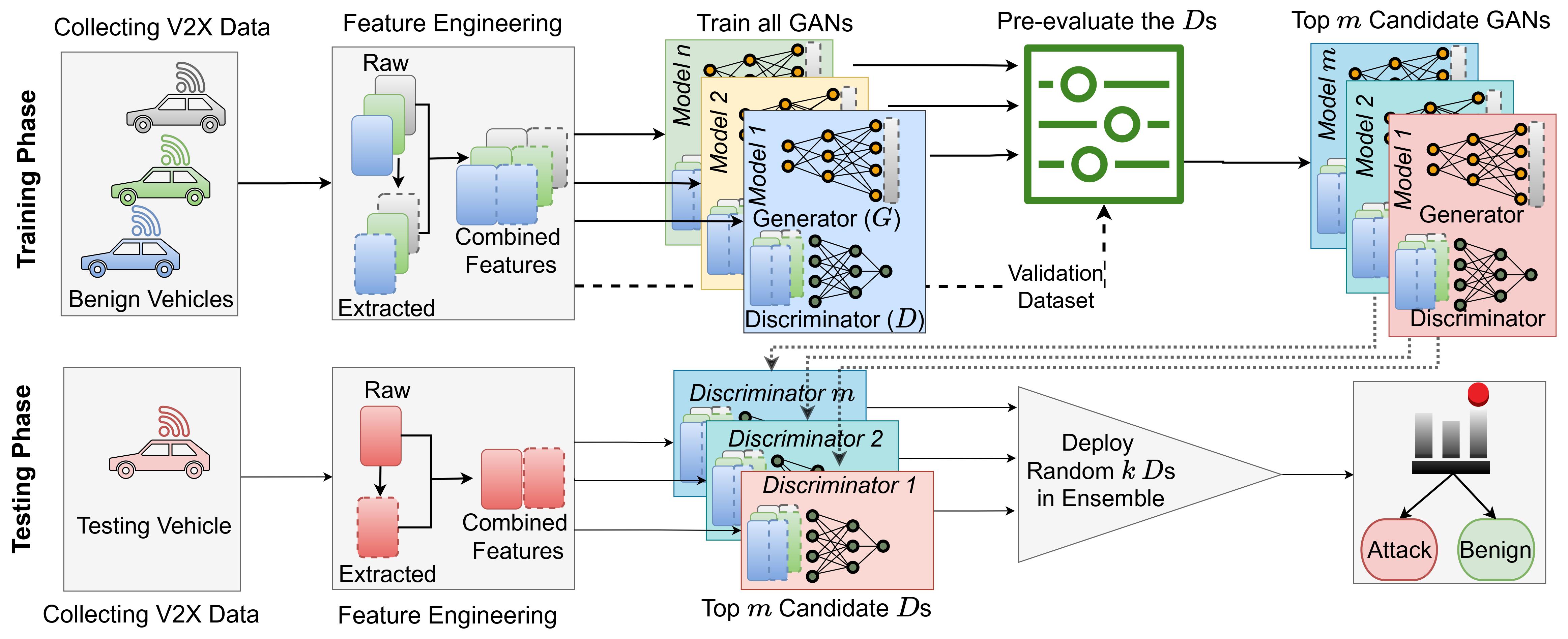
Our research focuses on improving the security of Controller Area Networks (CAN) in modern vehicles, which are increasingly dependent on interconnected electronic control units (ECUs) for critical functions. The CAN protocol, designed for reliability and efficiency, lacks built-in security measures, making it vulnerable to sophisticated cyberattacks that exploit these gaps. Traditional IDS methods, which monitor timing and message sequences, are inadequate against advanced attacks that manipulate signal semantics. Our work addresses these challenges by developing detection systems that can identify such subtle intrusions, enhancing the overall security of vehicular networks.